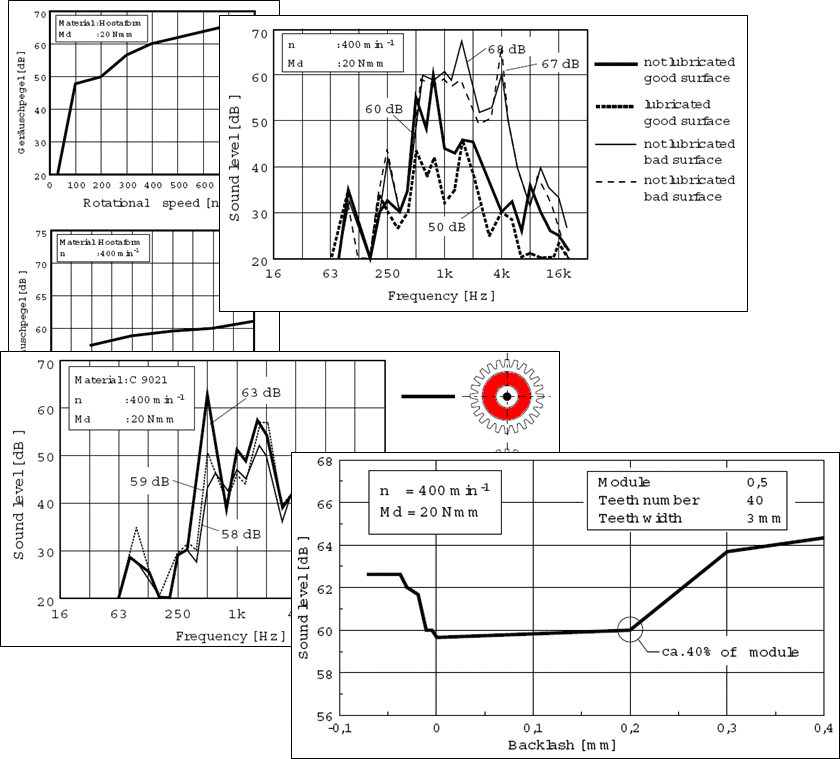
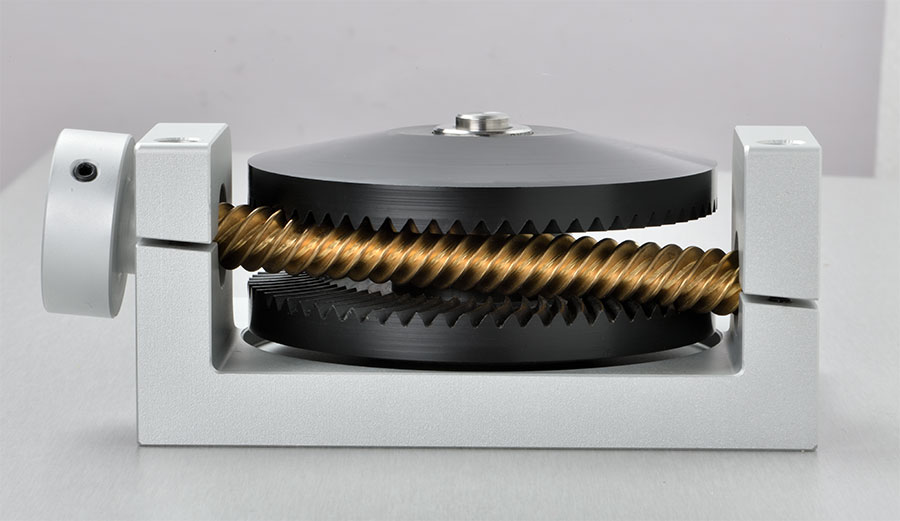
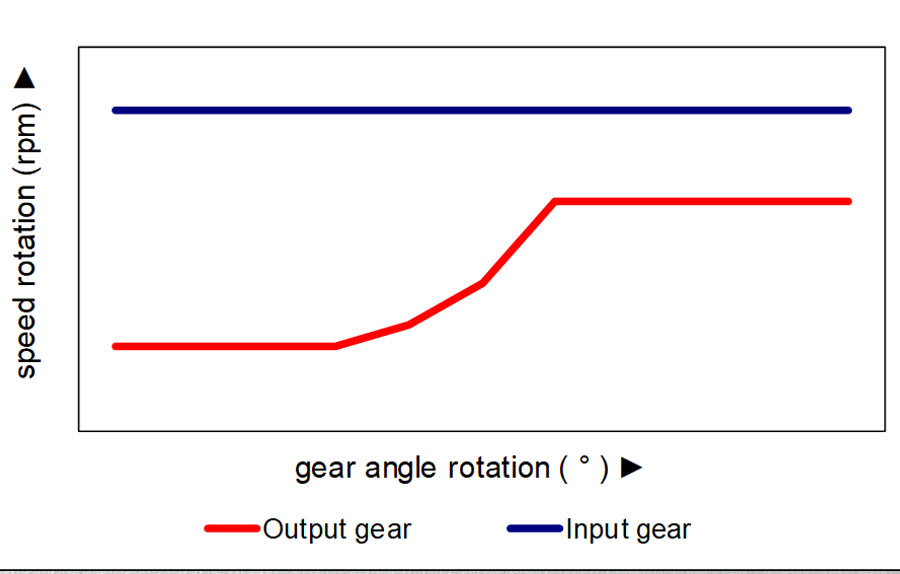
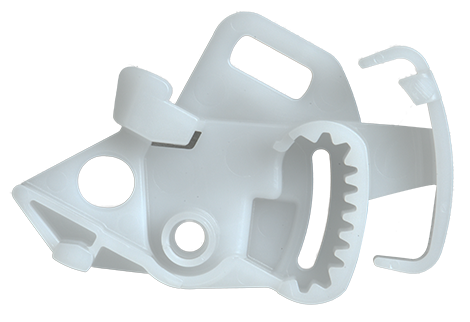
Numerous parameters may affect the noise of gear-drives. ITWSmpi has gathered a strong knowledge about the influencing factors on noise so that we can now help our customers at the earliest stages of their projects to define gear-trains as quiet as possible. We have developed specific database and tools to design low-noise actuators.
Do not hesitate to contact us should noise in your actuators is a criteria that you have to address.
.jpg)